 In the realm of automation, the optimization of AI robot walking stands as a pivotal aspect that can significantly enhance operational efficiency. As industries increasingly rely on robotic solutions to streamline processes, the ability for robots to walk effectively becomes crucial in diverse applications—from manufacturing floors to healthcare environments.
This blog will explore innovative strategies and practical tips for improving AI robot walking capabilities, focusing on biomechanical design, advanced algorithms, and real-time feedback systems. By addressing the intricate balance of stability, speed, and energy efficiency, we aim to unlock the full potential of robotic mobility, paving the way for a new era of automation.
Join us as we delve into the nuances of optimizing AI robot walking to revolutionize how robots interact with their environments and perform tasks with enhanced productivity.
In the realm of automation, the optimization of AI robot walking stands as a pivotal aspect that can significantly enhance operational efficiency. As industries increasingly rely on robotic solutions to streamline processes, the ability for robots to walk effectively becomes crucial in diverse applications—from manufacturing floors to healthcare environments.
This blog will explore innovative strategies and practical tips for improving AI robot walking capabilities, focusing on biomechanical design, advanced algorithms, and real-time feedback systems. By addressing the intricate balance of stability, speed, and energy efficiency, we aim to unlock the full potential of robotic mobility, paving the way for a new era of automation.
Join us as we delve into the nuances of optimizing AI robot walking to revolutionize how robots interact with their environments and perform tasks with enhanced productivity.
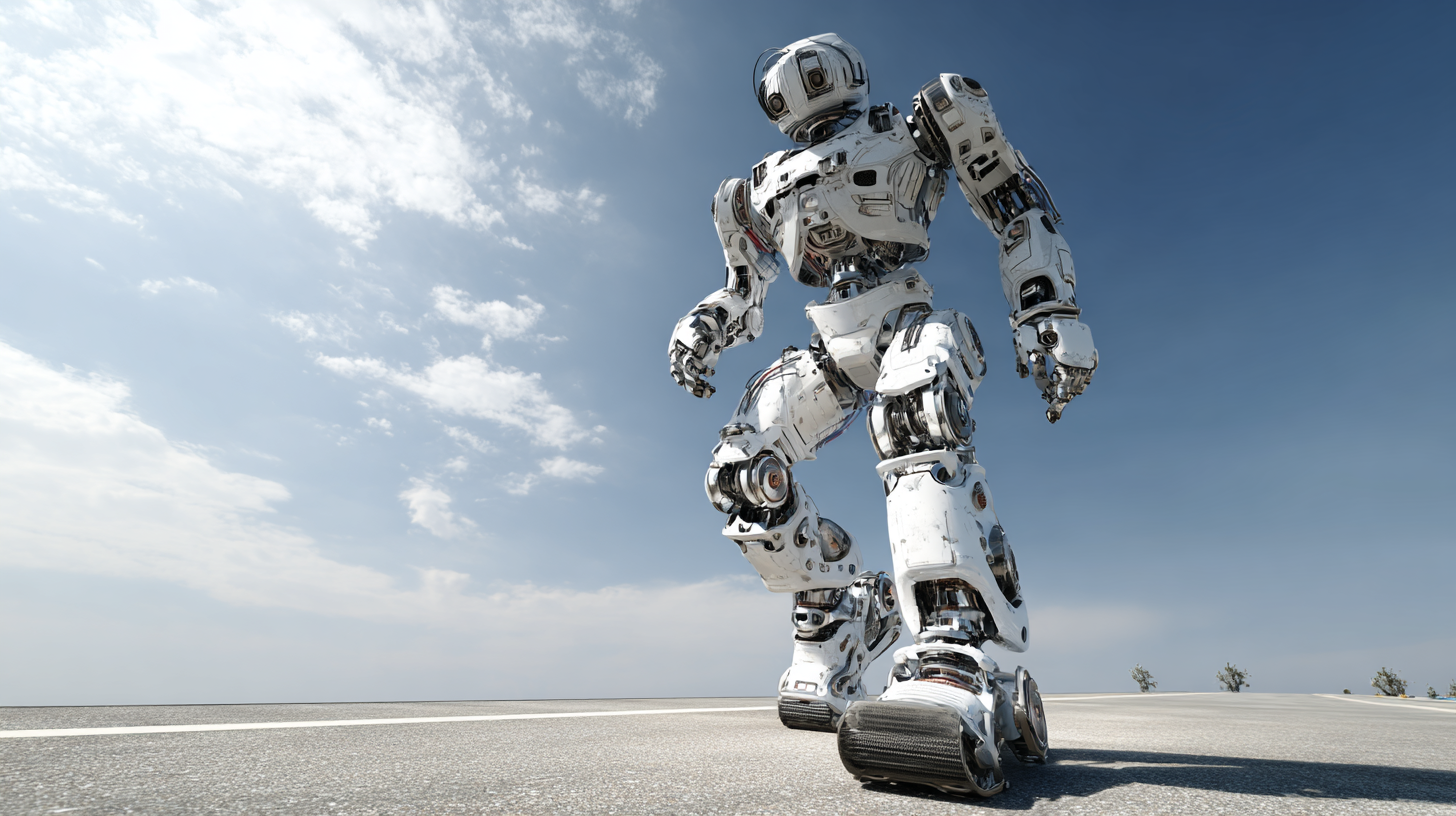
The mechanics of AI robot walking are rooted in a combination of advanced algorithms, sensor technology, and biomechanical principles. At the core of these systems lies the integration of sensors that gather real-time data about the environment, enabling the robot to make informed decisions about movement. These sensors typically include gyroscopes, accelerometers, and cameras, which work in unison to create a comprehensive understanding of the robot's orientation and surroundings. By manipulating the data from these sensors, developers can program the robot's gait, allowing it to traverse diverse terrains efficiently.
Another fundamental aspect of AI robot walking mechanics is the application of machine learning techniques to improve locomotion. Through trial and error in simulated environments, robots can learn optimal walking patterns to enhance their stability and speed. This iterative process helps the robots develop a level of adaptability when facing obstacles or changing ground conditions. By continually refining the algorithms that govern their movement, AI robots can achieve a harmonious balance between agility and efficiency, making them suitable for various automated tasks in real-world scenarios.






 Optimizing control algorithms for robot mobility is crucial for enhancing
Optimizing control algorithms for robot mobility is crucial for enhancing